A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait
By A Mystery Man Writer

A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

Optimized step length of different controllers.
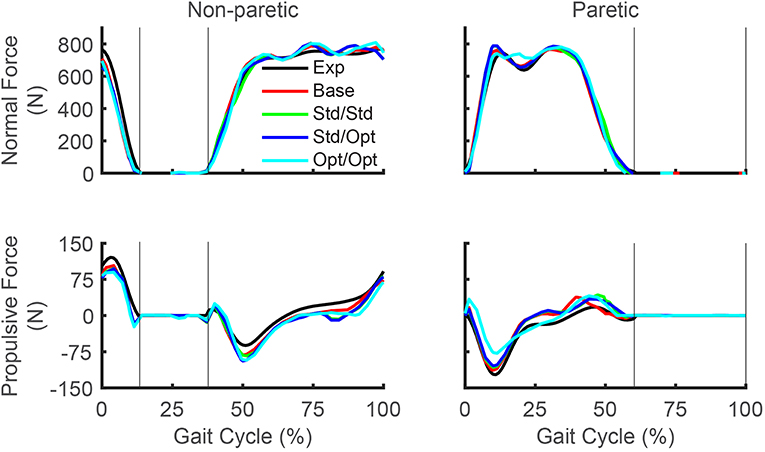
Frontiers Computational Design of FastFES Treatment to Improve Propulsive Force Symmetry During Post-stroke Gait: A Feasibility Study
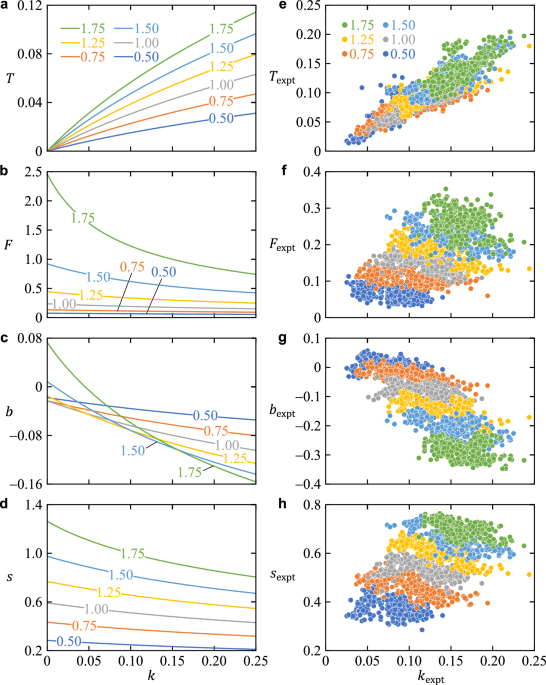
A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

The Age-Associated Reduction in Propulsive Power Generation in Walking

Optimized energy efficiency (), resulted from different control
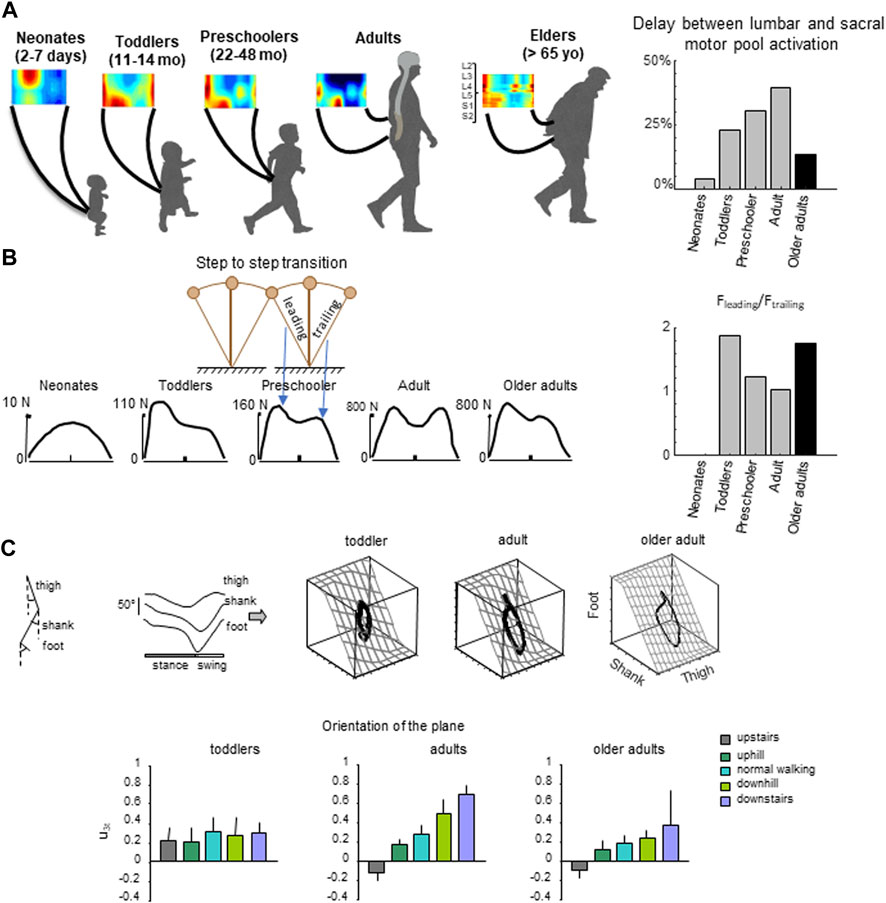
Frontiers Unraveling age-related impairment of the neuromuscular system: exploring biomechanical and neurophysiological perspectives

bimor

Motion Trajectory Optimization of an Assistive Device During

PDF) A powered simple walking model explains the decline in propulsive force and hip flexion torque compensation in human gait

Muscle Activity During Gait - Physiopedia
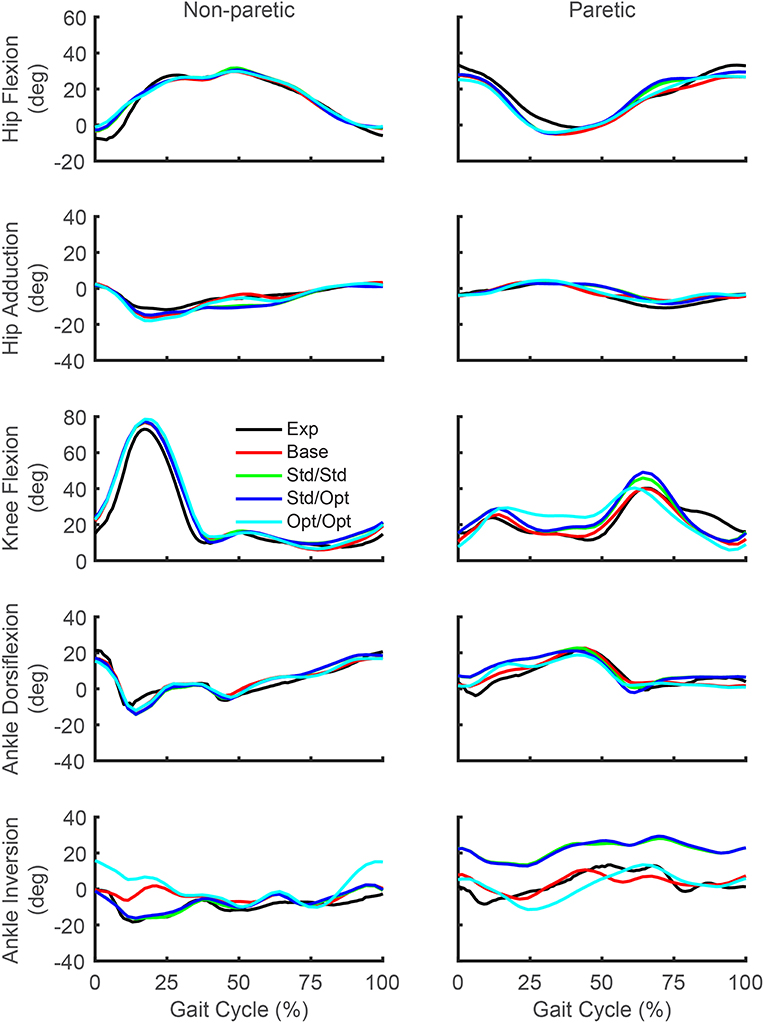
Frontiers Computational Design of FastFES Treatment to Improve Propulsive Force Symmetry During Post-stroke Gait: A Feasibility Study
- Need help with sizing, super confused about hip spring measurement. : r/corsets

- Flesh and booze: Wildest spring break spots

- Gallery of From Winter to Spring Clubhouse / Shanghai Hip-Pop Design Team - 5

- Zhou Xiaoxiong black tight dress female 2023 spring and summer new hot – Lee Nhi Boutique

- MCC114 underbust Corset Black Double Polyester Corsetry Mesh Satin

- 7. Kettlebell High Pull Skill Level: Intermediate 7.1. Main Muscle

- LULULEMON FAST FREE 7/8 Tight (Nulux 25) Black Grape SZ 4 NWOT

- Tender Care TV Ad Q4 2023-2024 45s (Philippines) [CC]

- J'Amore EDP Eau De Parfum 3.4 oz Spray Our Impression Version of J'Adore By
- True & Co. True Everybody Women's Plus Size Scoop Neck Lift Bra - Light Beige 2x : Target
