Frontiers Gait Optimization Method for Humanoid Robots Based on Parallel Comprehensive Learning Particle Swarm Optimizer Algorithm

By A Mystery Man Writer
Frontiers Gait Optimization Method for Humanoid Robots Based on
Three novel quantum-inspired swarm optimization algorithms using
Frontiers A parallel heterogeneous policy deep reinforcement

Frontiers Gait Optimization Method for Humanoid Robots Based on

Particle Swarm Optimization aided PID gait controller design for a

Sensors, Free Full-Text

Mathematics, Free Full-Text
A Comprehensive Review of Swarm Optimization Algorithms

Using bilateral symmetry of the biped robot mechanism for
Frontiers Gait Optimization Method for Humanoid Robots Based on
Frontiers Gait Optimization Method for Humanoid Robots Based on

Advancements in Humanoid Robots: A Comprehensive Review and Future
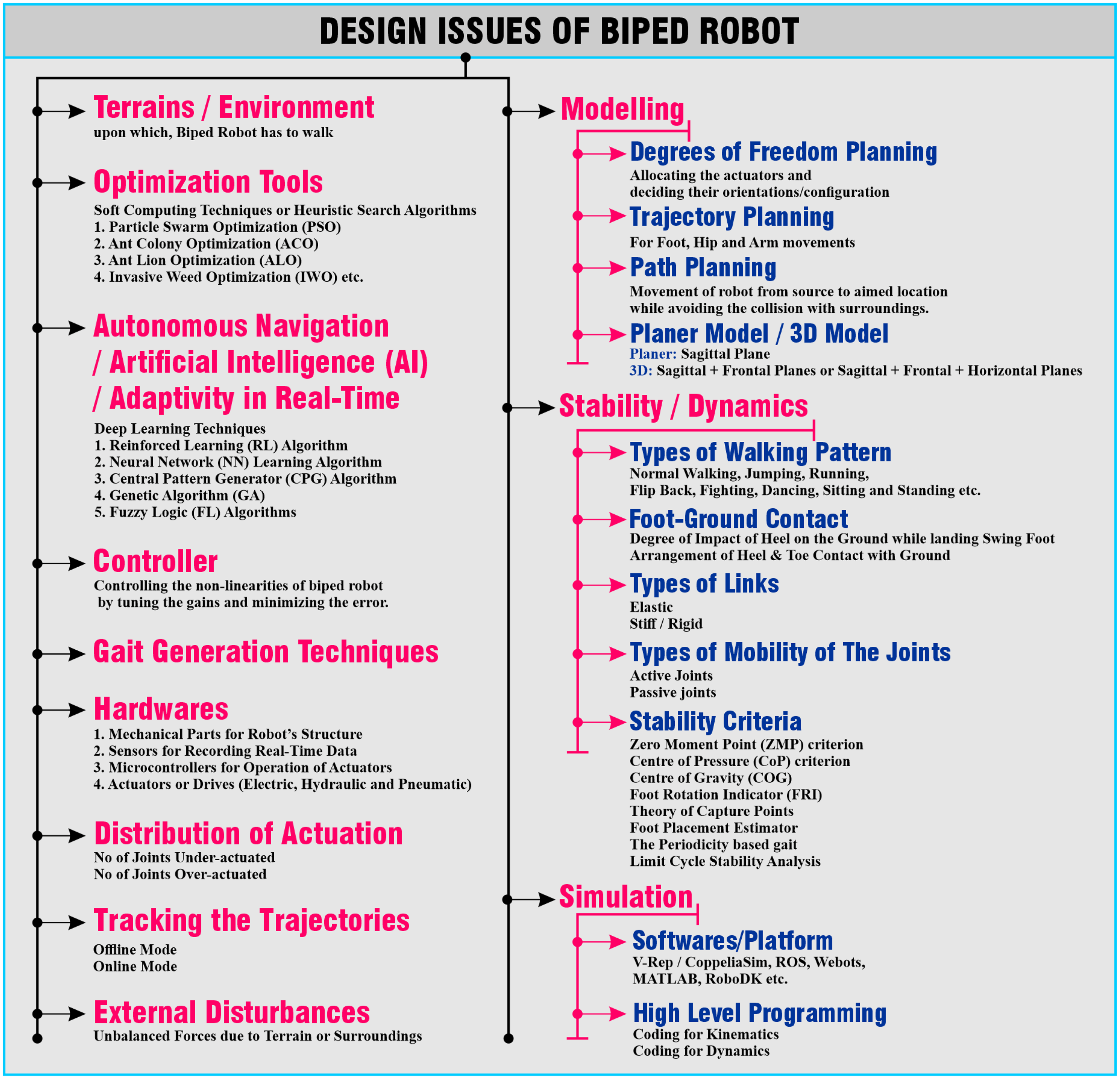
A review on gait generation of the biped robot on various terrains

- Bras for Wome Ultra Thin Nipple Pads Silicone Nipple Cover with Breathable Hole Self Adhesive Nipple Cover with Nipple 8Cm Beige A

- Legging Glow Shine em 2023 Legging, Calças fashion, Calças apertadas

- RYRJJ Women's Plus Size Wireless Bra Flower Print Full Cup Lift Bras for Women No Underwire Comfort Push Up Shaping Wirefree Everyday Bras(Coffee,S)

- HSIA Minimizer Bras For Women Full Coverage Unlined Bra

- Sumptuously Soft Padded Plunge T-Shirt Bra
